Micro/nanorobots hold exciting prospects for executing different tasks in complex microenvironments due to their small size, high flexibility, controllability, and environmental adaptability. However, traditional rigid micro/nanorobots still face difficulty in performing different biomedical tasks in complex and unstructured narrow microenvironments due to their limited flexibility and insufficient deformability.
To address this problem, in a new paper published in PhotoniX, a team of scientists led by Professor Hongbao Xin from Institute of Nanophotonics, Jinan University, China, has developed a new soft microalga robot (saBOT).
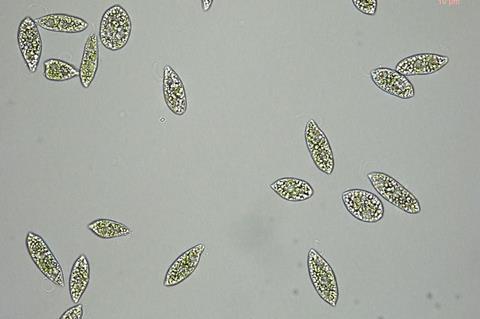
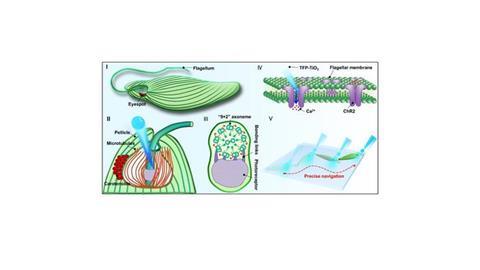
The team innovatively used the microalga, Euglena gracilis, with deformation and motion capabilities in nature as the main body to construct a soft microalgae robot (saBOT) using a photonic nanojet (PNJ) generated by a TiO₂ microsphere lens. The PNJ generated by the combination of a tapered optical fiber probe and TiO₂ microsphere lens (TFP-TiO₂) highly focused the light beam, enhancing the light intensity received by the Euglena gracilis photoreceptors.
Light-sensitive channel
This intensive light signal activated the light-sensitive channel (ChR2) in the receptors, paving the way for saBOT’s controllable deformation and precise navigation (Figure 2, below). Since TFP-TiO₂ can be flexibly manipulated, precise control of saBOT deformation is achieved by targeting different parts of the Euglena gracilis (such as photoreceptors, body, and tail) , laying the foundation for the subsequent selective release of drugs.
In addition, by utilizing the phototactic property of Euglena gracilis and adjusting the optical power under the action of PNJ, saBOT was successfully controlled to navigate precisely in a complex, winding, and narrow microchannel.
Finally, the saBOT was demonstrated to traverse cell clusters to precisely deliver drugs to designated cells, and was used to execute biomedical tasks such as targeted drug delivery and selective cell killing within cell clusters. These capabilities of the saBOT would provide many new opportunities for microrobot to execute different biomedical tasks in the complex and unstructured microenvironments that are inaccessible with conventional tools or rigid microrobots.





{kind=link}
No comments yet